Робоарт. Часть 1:
как роботы появились в галереях
как роботы появились в галереях
Текст: / Иллюстрация:
T&P составили подробный гид по истории присутствия роботов в разных жанрах искусства. В первом выпуске поговорим о том, как машины добрались до галерей и сделали робоарт естественной частью арт-мира как редимейд или жанр инсталляции. Вторая часть будет посвящена сценическим видам искусства: театру, хореографию и перфомансу, главными героями которых являются машины.
Основные вехи и художники робоарта
Начало
Основные вехи
Что сейчас
Основные вехи и художники робоарта
Со времен двигающихся игрушек китайских ученых Мо Цзы и Лу Баня, инженерных открытий Герона Александрийского и Аль-Джазари, льва и рыцаря Леонардо да Винчи, японских кукол karakuri ningyo механические объекты и человекоподобные существа постепенно обретали эстетическую составляющую. В 19 веке и первой половине 20-го случился бум научно-фантастической литературы от «Франкенштейна» Мэри Шелли 1818 года, героев пьес Карела Чапека, придумавшего термин «робот» в 1922-м, рассказов Исаака Азимова до персонажей Кира Булычева и «Космической одиссеи 2001», перекочевавших в кинематограф, мультипликацию и телевидение. Вкупе с научно-техническим прогрессом и первыми промышленными автоматизированными машинами к 50-м годам 20 века роботы добрались до искусства. Для художников они — новые медиумы. Роботы двигаются, реагируют на внешние раздражители по заданному коммуникативному сценарию или без него и помогают по-новому смотреть на привычные устои и рефлексировать на темы настоящего, будущего и экзистенциальных проблем.

Cha-hakobi ningyo (Tea-serving Boy). © The Trustees of the British Museum

Cha-hakobi ningyo (Tea-serving Boy). © The Trustees of the British Museum

The Aeolipile built by Heron of Alexandria (circa 130 BC)
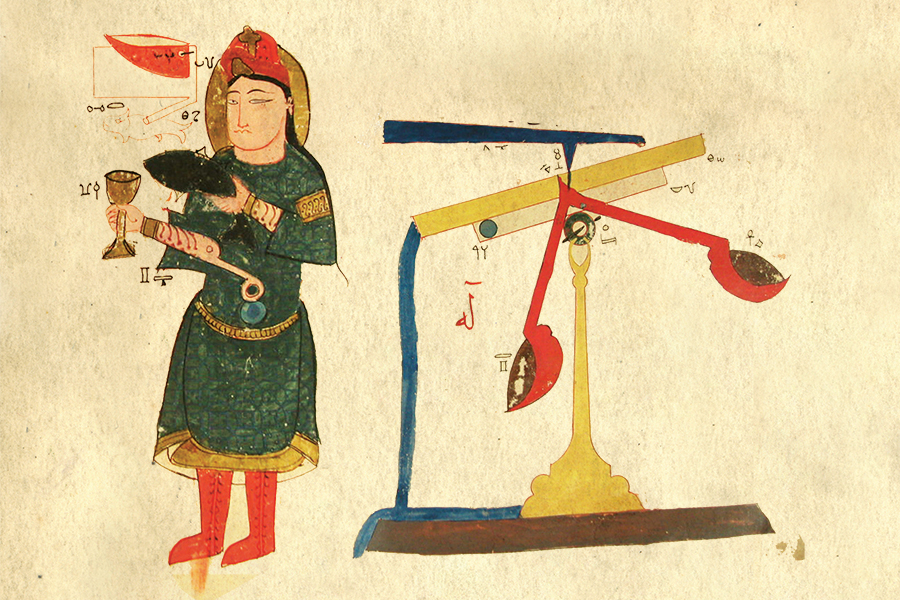
Al-Jazari, 1206
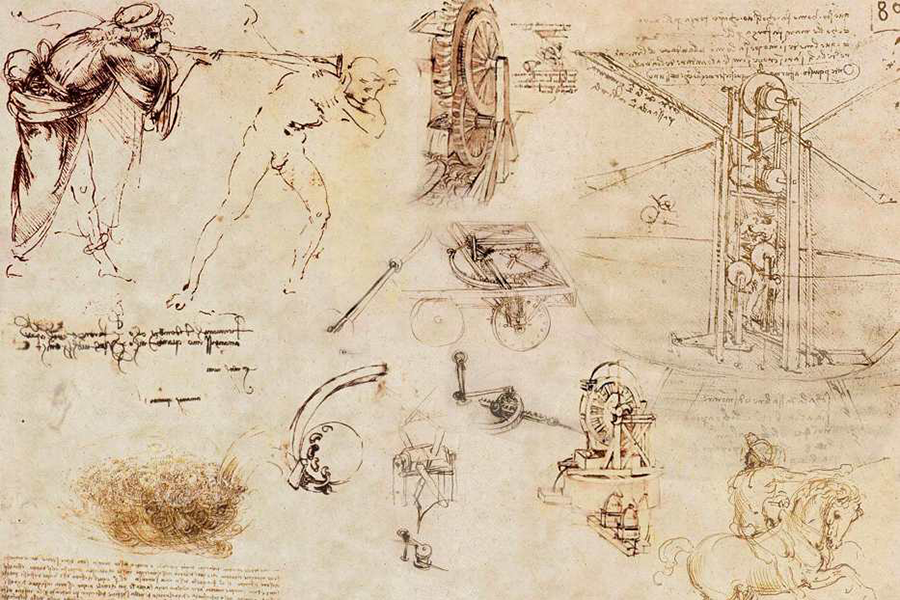
from the Notebooks of Leonardo da Vinci circa 1478-88. Preparatory Studies of Devices and Figures

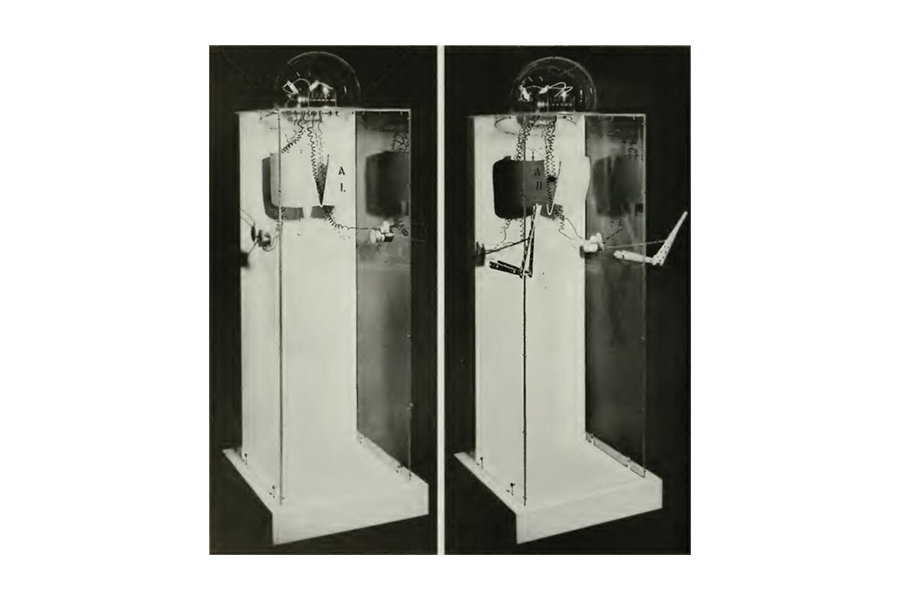
«Zoe», Джон Невил Маскелайн, 1877 год

Шахматный автомат Вольфганга фон Кемпелена, 1769
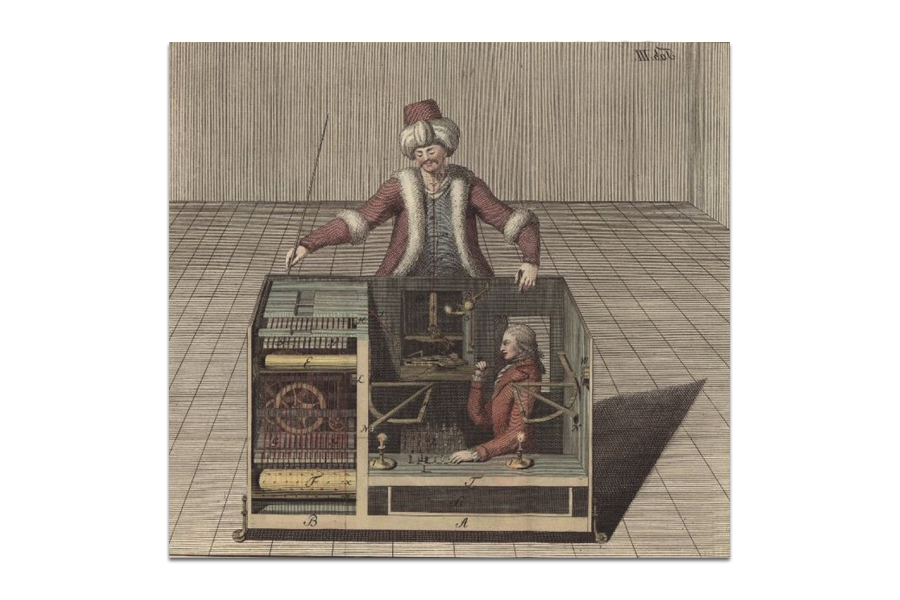
Шахматный автомат Вольфганга фон Кемпелена, 1769
Начало
Начиная с 60-х годов 18 века европейские механики, среди которых были в основном часовые мастера, создали ряд движущихся кукол, способных говорить, рисовать или писать на разных языках. Так от «Рисующего мальчика» Henri Maillardet 1805-го года дело дошло до женщины с управляемой рукой, пишущей рекламные объявления в Америке 20-х. В 1928 году японский биолог и ботаник Makoto Nishimura сконструировал робота Gakutensoku (с яп. — получающий знания из законов природы). Gakutensoku до сих пор может двигать головой, моргать, улыбаться, «дышать» и писать, когда загорается лампа в его левой руке. В отличие от роботов-рабочих из пьес Чапека Gakutensoku — попытка создать эстетический объект, а не раба промышленности.
Рисующий мальчик
женщина с рукой
Gakutensoku
Основные вехи
В 50-60-е многие инженеры, художники и любители продолжали тему с рисующими машинами, выдававшими в результате либо абстрактные полотна, либо вполне читаемые изображения. Наиболее знаковой работой считается «Remote-control painting» Акиры Канаямы из японской авангардной группы «Гутай», впервые представленная в 1955-м. Канаяма разработал четырехколесное электро-механическое устройство с дистанционным управлением для печати на виниле, которое по замыслу также как и человек может быть художником.
Robot painting machine Рэя Огра
пук пук
В 56-м французский новатор в сфере кинетического искусства Николя Шеффер создал знаковую работу CYSP 1 (Cybernetic Spatiodynamic Sculpture) — первую самоуправляемую автономную кибернетическую скульптуру. CYSP 1 стал мостиком между кинетикой и роботостроением, впервые заговорив о возможности машины к восприятию и познанию.
Это открыло новые направления для эстетических исследований и художественных практик, результатом чего стали три значимые работы, определяющие движение мысли художников робоарта до сих пор.
Это открыло новые направления для эстетических исследований и художественных практик, результатом чего стали три значимые работы, определяющие движение мысли художников робоарта до сих пор.
CYSP 1
Для фестиваля Авангарда в Марселе того же 56-го года хореограф Морис Бежар поставил балет: вместе танцовщиками его компании на сцене присутствовала машина Шеффера, реагирующая на движения человеческих тел.

Первая их них — Robot K-456 Нам Джун Пайка и Шуи Абе 1964 года, названный в честь концерта Моцарта Kochel 456. Эта карикатура на человека, которую Пайк снабдил специфическим чувством юмора, поднимала проблемы политического влияния, дистанционного управления и свободного передвижения. Робот был сделан специально для уличных акций, чтобы, как говорил Пайк, воздействовать на прохожих подобно внезапному душу. Рефлексируя на тему роли машин в экономике и опасения общества, что роботы отберут у человека работу, Пайк говорил, что его робот наоборот дает работу людям, ведь чтобы тот передвигался десять минут, нужна помощь пяти человек. В 1982 году в рамках ретроспективы творчества Пайка робот был сбит автомобилем на Медисон Авеню, перфоманс был назван художником «первой аварией 21 века».
Robot K-456 Нам Джун Пайка
На одной из первых демонстраций робот, управляемый Пайком, ездил по улицам Нью-Йорка, транслируя запись инаугурационной речи Джона Кеннеди и испражняясь фасолью.
Вторая работа — «Squat» Тома Шеннона 1966 года, первый интерактивный гибрид органического и неорганического. Прикосновение к растению меняет напряжение, что включает моторы и приводит в движение механические ноги и руки скульптуры, которая начинает издавать жужжащие и стрекочущие звуки. Работа поднимает вопрос взаимодействия природы и человеческих изобретений, людей и машин, которые с точки зрения художника являются не противоположностями, а частями единого целого.
«Squat» Тома Шеннона 1966 года
The Senster, третью легендарную работу из списка, художник Эдвард Игнатович создавал в течение 1969-70 годов. Это один из первых арт-объектов, управляемых компьютерами. В отличие от «Squat'а», для которого решающее значение имела тактильность, застенчивый «The Senster» реагировал на голос и приближение зрителей. Робот представлял собой треногу высотой в 2,5 метра с рукой, подобной клешне омара, на конце которой находился чувствительный к движению сенсор. Робот двигался на звук, а при резких движениях и шуме «стеснялся» и отдалялся от крикливых зрителей с помощью шести независимых электрогидравлических механизмов, подальше от возникшей угрозы.
The Senster
В разработке программного обеспечения для скульптуры участвовала компания Phillips.
Front matter, or preliminaries, is the first section of a book, and is usually the smallest section in terms of the number of pages.
В 70-е художники продолжили изучать возможности машин реагировать, адаптироваться к реальности и уже взаимодействовать между собой. В 70-м году архитектор Николас Негропонте совместно с участниками Architecture Machine Group, основанной им в родном MIT, создал инсталляцию под названием Seek. Это запрограммированная рука, переставляющая блоки в кубе из оргстекла в зависимости от передвижения находящихся внутри песчанок.
В 74-м пионер задействования электроники в искусстве Норман Уайт создал Ménage, инсталляцию из пяти свето-сканирующих машин, первое сообщество роботов, взаимодействующих между собой. Один из них находился на полу, четверо остальных передвигались по рельсам на потолке, глядя и реагируя на источники света друг друга. Уайт был первым художником, который на протяжении многих лет отстаивал право роботов быть частью искусства, которое, в свою очередь, должно выходить за пределы музеев и галерей.
В 74-м пионер задействования электроники в искусстве Норман Уайт создал Ménage, инсталляцию из пяти свето-сканирующих машин, первое сообщество роботов, взаимодействующих между собой. Один из них находился на полу, четверо остальных передвигались по рельсам на потолке, глядя и реагируя на источники света друг друга. Уайт был первым художником, который на протяжении многих лет отстаивал право роботов быть частью искусства, которое, в свою очередь, должно выходить за пределы музеев и галерей.
Seek
Ménage
В 77-м он создал «FOLL» (Facing Out Laying Low), который реагировал движением и визгом, то есть базовыми поведенческими реакциями, на изменения света и и запоминал их. Управляемый компьютером Motorola D-1 в купе с предыдущим опытом, поведение робота становилось непредсказуемым.
В 85-м Уайт разработал «Беспомощного робота» (Helpless Robot), которого дорабатывал до 97 года. Машина общалась к зрителям с просьбой повращать ее, меняя свое поведение в зависимости от количества оказанной помощи. В последней версии робот управлялся уже двумя компьютерами, один из которых контролировала угол вращающейся секции и обнаруживала человека с помощью инфракрасных детекторов движения. Второй компьютер анализировал происходящие действия и генерировал соответствующие ответы, которые робот «произносил». Идея беспомощности машины, которая наоборот обычно создается в помощь человеку, диаметрально переворачивает отношения человека и роботов.
В 85-м Уайт разработал «Беспомощного робота» (Helpless Robot), которого дорабатывал до 97 года. Машина общалась к зрителям с просьбой повращать ее, меняя свое поведение в зависимости от количества оказанной помощи. В последней версии робот управлялся уже двумя компьютерами, один из которых контролировала угол вращающейся секции и обнаруживала человека с помощью инфракрасных детекторов движения. Второй компьютер анализировал происходящие действия и генерировал соответствующие ответы, которые робот «произносил». Идея беспомощности машины, которая наоборот обычно создается в помощь человеку, диаметрально переворачивает отношения человека и роботов.

Helpless Robot
Другой художник того времени Роберт Сирайт также настаивал на том, что природа, наука и человек могут гармонично взаимодействовать друг с другом. В 83-м он создал «Electronic Garden #2», состоящий из пяти управляемых компьютером цветов. Подобно своему природному аналогу, робоцветы реагировали на температуру и влажность и по виду представляли собой домашний сад, управлять которым могли и зрители, нажимая на соответствующие кнопки. Эта идея легла в основу работы «House Plants», управляемая уже двумя компьютерами. В то время как высокий цветок распускался, реагируя на изменения освещения, тот, что пониже издавал своеобразные звуки. Продолжение эта идея виртуального сада получила через 12 лет в работе TeleGarden 1995 года.
Проблему симбиоза природы и технологий художники исследуют до сих пор (вот, например, роботизированная рука, управляемая нейронами коры головного мозга крысы, и работа Гарнета Хертса 2006 года, где машиной управляет таракан).
Проблему симбиоза природы и технологий художники исследуют до сих пор (вот, например, роботизированная рука, управляемая нейронами коры головного мозга крысы, и работа Гарнета Хертса 2006 года, где машиной управляет таракан).
Telegarden Overview
Посадкой и поливкой в TeleGarden занималось специальное устройство, управлять которым могли интернет-пользователи, создавая при этом некий аналог садового кооператива.
Front matter, or preliminaries, is the first section of a book, and is usually the smallest section in terms of the number of pages.
В 1993-м австрийская группа X-Space создала инсталляцию-референс на оптический телеграф (семафор, передающий сообщения с помощью световых сигналов на дальние расстояния, использовавшийся с 1794 года), предшественника электрического телеграфа. "Winke Winke" — это компьютер, находящийся в галерее, соединенный с роботом на крыше здания. Текст, введенный зрителями, преобразовывался в сигналы международной семафорной азбуки, которые робот транслировал с помощью прикрепленных к нему рук с флажками. На другой крыше сигнал считывала видеокамера, конвертируя их обратно в текст и передавая эти записи в компьютер. На австрийском "winke winke" означает «пока-пока»: цифровые технологии, соединенные с оптическим телеграфом, символизировали новые начинания.
Объекты искусства, которые и раньше часто создавались учеными-инженерами, продолжают появляться в стенах технологических университетов. Так, в 1995 году художники Нина Собелль и Эмили Хартцелль совместно с учеными Политехнического института Нью-Йоркского университета создали инсталляцию с технологией виртуальной реальности Alice Sat Here — инвалидную коляску, оборудованную камерой с доступом в интернет. В то время как зрители в галерее могли садиться и управлять коляской, зрители в сети могли контролировать движения камеры. На мониторе в галерее видео с камеры транслировалось в реальном времени, а в сеть попадали последовательные кадры. Кроме того, рядом с монитором стояли тачпэды, касаясь которых остальные зрители в галерее также вовлекались в процесс управления камерой: маленькая камера над монитором фиксировала изображения улицы, которые затем совмещались с изображениями с камеры на коляске и загружались в сеть. Эта емкая конструкция создает метафору виртуальной сети с ее многоуровневым контролем (наблюдение, навигация и фиксацией изображений) и новым опытом, который она предлагает: мы попадаем в нее словно Алиса в страну чудес.
Несмотря на то, что многие художники стали использовать возможности присутствия человека в виртуальном пространстве и дистанционное управление, остались и те, кто продолжил осмыслять машину как таковую и ее нахождение в разных пространствах. Известной работой такого рода стал самоуправляемый робот Petit Mal австралийского художника Симона Пенни, представленный в 1996 году. Двухколесный робот ловко исследовал пространство вокруг себя и реагировал на людей. Его поведение не было похоже ни на антропоморфное, ни на зооморфное, и это создавало впечатление, что он действительно обладает интеллектом и своей собственной природой.
Petit Mal
Petit Mal был неким антироботом, попыткой описать поведение машины по эстетическим канонам, которых не существовало, сделать ее очаровательной. Сталкивая зрителя с искусственным интеллектом, который никем не управляется и не симулирует поведение некоей биологической системы, художник исследует социальные и культурные последствия этого взаимодействия. Интерактивное поведение машины зависит от опыта зрителя, то есть, как показывает и тест Тьюринга, степень интерактивности субъективна. Таким образом, робот становится не инструментом, который выполняет поставленные задачи, а самостоятельным объектом, исследующим мир.
В 90-е годы к растущему объему тем и вопросов, к которым обращаются художники, добавились новые технические возможности. В 1994-м группа американских художников создала веб-инсталляцию The Mercury Project: симулятор археологических раскопок. Подобно интернет-поиску, зрители могли удаленно управлять роботизированной рукой, которая находила в песке различные предметы, связанные «Путешествием к центру Земли» Жюля Верна в качестве метанарратива. В интернет-инсталляции CyberSM III Кирка Вулфорда и Стахла Стенсли того же года пользователи, находящиеся удаленно друг от друга, взаимодействовали на расстоянии с помощью электронных устройств. На чувствительных зонах одного из участников размещались сенсорные датчики, которые вибрировали, в зависимости от прикосновения другого участника до тех же самых зон на своем теле. Они также могли общаться друг с другом: компьютеры, соединенные сенсорами, повышали восприятие с помощью изображений и звука. Целью художника было исследовать тактильные ощущения в контексте электронного общения.
Front matter, or preliminaries, is the first section of a book, and is usually the smallest section in terms of the number of pages.
Продолжая изучать поведение искусственного интеллекта художники Луи-Филипп Демерс и Билл Ворн создали инсталляцию At the Edge of Chaos, в которой четыре пневматических привода как животные в клетке сражались за метафорический кусок мяса — стальной куб. Их поведение было автономным, но также зависело от зрителей: аудитория сканировалась восемью сенсорами, которые запускали звуковые и световые эффекты. В 96-м Демерс и Ворн пошли дальше и собрали более пятидесяти роботов в инсталляции No Man's Land в шумной комнате в мигающим стробоскопом.
Количество машин, новых технологий и непонятных существ, иногда до отвращения напоминающих нас самих, в искусстве будет расти. Роботы — это, в первую очередь, наша возможность посмотреть на себя со стороны и продолжить разбираться в том, что значит быть человеком.
Количество машин, новых технологий и непонятных существ, иногда до отвращения напоминающих нас самих, в искусстве будет расти. Роботы — это, в первую очередь, наша возможность посмотреть на себя со стороны и продолжить разбираться в том, что значит быть человеком.
Основные вехи
